
近年、多くの業界で人手不足が深刻な問題となっています。これは、塗装業界も例外ではありません。
人材確保が難しいことから、ロボットの導入でカバーできないか検討している現場も多いようです。
しかし、ロボット導入の高いハードルの1つが「ティーチング作業」です。
ティーチングとは、ロボットに動作を教え込む作業のこと。
相談者さんもティーチングについて、どうやらお困りのようです。

なんだかお困りのようなのだ~どうしたの~?

実は、熟練の作業者の引退や若手人材の確保が困難なことから、塗装ロボットを導入しようと決めたんです。
すごいのだ!塗装ロボットは仕上がり品質が均一で生産性の向上も期待できるから、現場の重要な戦力になるのだ!
そうなんです。でも、塗装ロボットを導入するにはティーチング作業が必要だと以前学びました。弊社では今までロボットを導入したことがないので、ティーチング作業の経験がある社員はいません。そもそも、どのようにティーチングを行うのかさえ分かりません・・・。
これは重症なのだ・・・塗装グリーン!助けてあげて!

お待たせしました!ティーチング作業は専門知識が必要になるため、自社で対応できる企業は多くありません。
だからといってティーチングについて何も知らないのは不安ですよね。
今回はティーチングの基本をご紹介します!

ありがとうございます!
ティーチングについて何も知らないまま導入の検討を進めるのは不安だったので、ぜひ教えてほしいです!
多軸塗装ロボットの特徴
自動塗装機は、レシプロ塗装機と多軸塗装ロボットの大きく2種類に分けられます。
レシプロ塗装機は上下や左右の一方向に一定速度で往復しながら塗装する塗装機である一方、多軸塗装ロボットは人間と同じように細かく滑らかに動き塗装できる特徴を持っています。
今回は、この多軸塗装ロボットとそのティーチング作業に焦点をあてます。
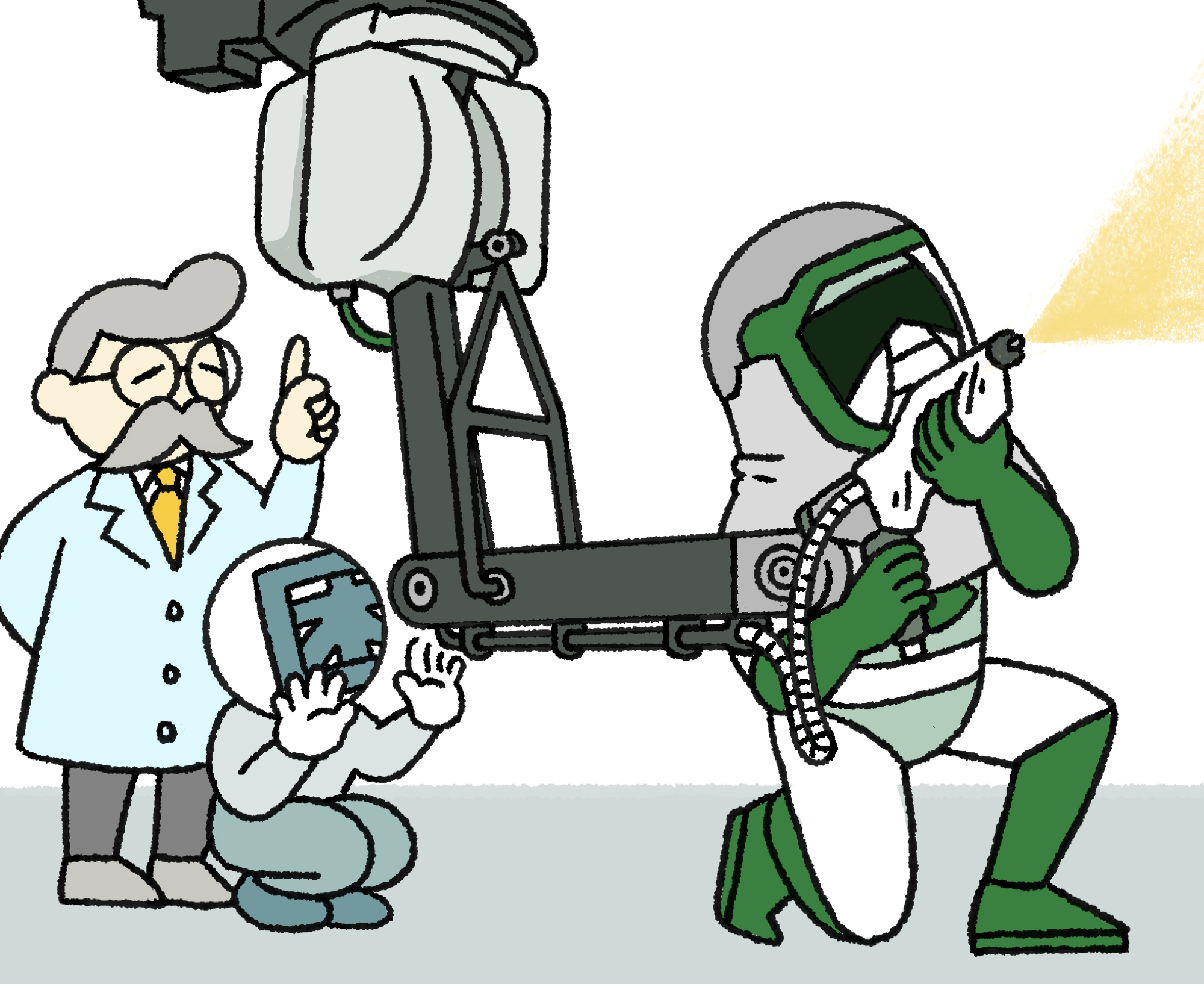
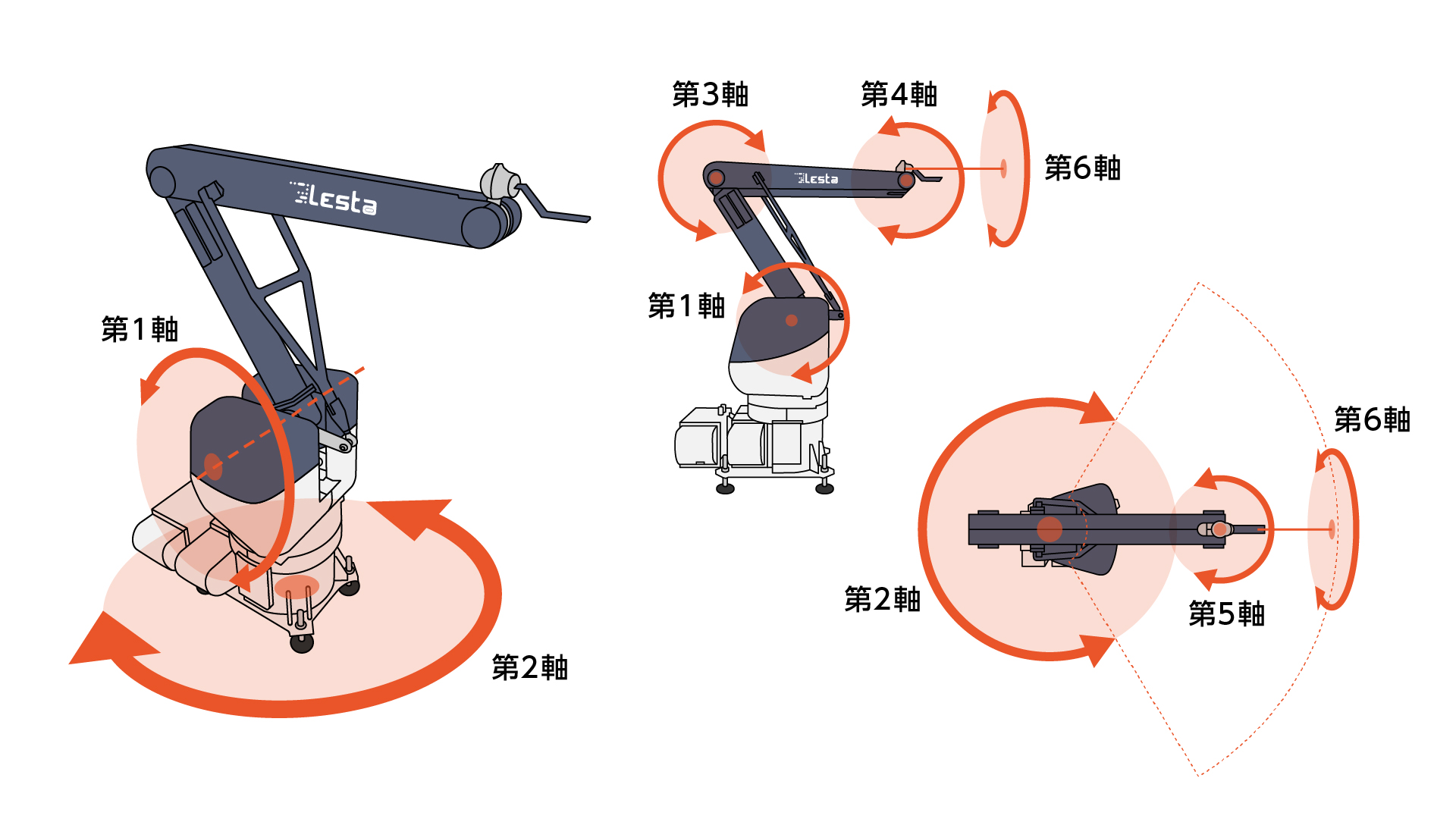
人間のような動作をする多軸塗装ロボットには複数の関節があります。
例えば、弊社がご提案するイタリアLesta社の「LEBOT MV A6」は6軸となっており、各軸を人間の体の動きに当てはめると下記のようになります。
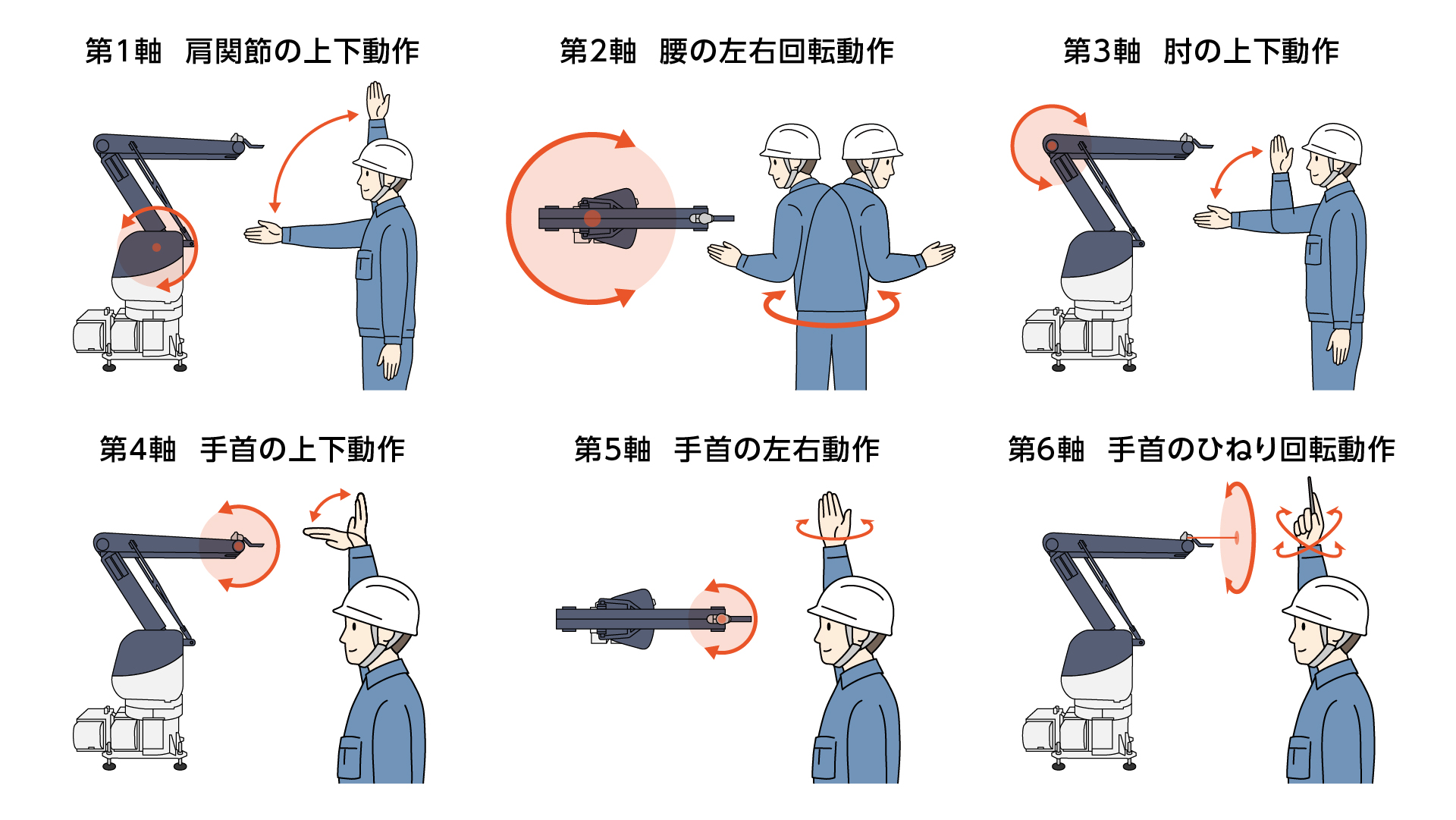
第1軸 肩関節の上下動作
第2軸 腰の左右回転動作
第3軸 肘の上下動作
第4軸 手首の上下動作
第5軸 手首の左右動作
第6軸 手首のひねり回転動作
このように各軸が人間の持つ関節の動きに対応していますが、人間は6つ以上の関節があるためロボット以上に複雑な動きをしています。
完璧に人間と同じ動きをすることは困難ですが、多軸塗装ロボットであれば人間に近い動きで複雑形状のワークでも均一かつ高品質な仕上がりを実現します。
「人間と同じように塗装できるのなら、多軸塗装ロボットを導入すれば人手不足問題も解決するのでは・・・」と思う方もいるかと思いますが、大手企業以外ではなかなか導入が進んでいないのが現状です。
 |
 |
進まないロボット化の原因
多軸塗装ロボットの導入が進まない原因のひとつが「ティーチング作業」です。
多軸塗装ロボットは人間に近い複雑な動きができますが、その能力の高さゆえに、動きを覚えさせるティーチング作業の難易度も高く、社内にそれを行える担当者がいないことが多軸塗装ロボット導入への大きな障壁となっています。
そもそも、ティーチングとはどのように行うのでしょうか?
各メーカーで設定に違いはありますが、今回はよく採用されている2つのティーチング方法をご紹介します。
ポイント to ポイント方式
ポイント to ポイント方式は、ティーチングの中では一般的な方式です。
この方式は、塗装を始める「始点」と終える「終点」を座標系で指定し、その間の動作速度を決め動かす方式です。
座標の指定にはワールド座標やツール座標など様々な方法があり、軸数が少なければ簡単に指定することができます。
例えば、弊社のオリジナル自動塗装機「NEO Easy Coaterフラット」であれば、X軸とY軸の2軸のみの指定になります。
しかし、6軸のような多軸の場合、3次元位置の3軸+各軸の傾きの3軸を指定し、始点の先端位置や角度を設定する必要があるため、これだけでも掛かる手間が多いことが明白です。
この始点・終点の位置の指定は、ティーチングペンダントと呼ばれるリモコンでロボットを操作し行う方法と、ロボットを直接その位置へ動かし指定する方法があります。
いずれの方法にせよ、四角い平面のワークであれば端と端を指定していくことで比較的簡単かつ正確に動作をティーチングすることが可能です。
一方で、曲面の多い立体的な形状の場合、曲線にあわせて始点と終点をより多く設定しないとカクカクした動作となってしまいます。
曲面に合わせた動作を覚えられるようなアシスト機能が備わっているロボットもありますが、立体物のティーチングは難しく、ロボットの操作に精通した人でないと動作をティーチングすることは困難です。
また、ロボットの関節や先端部の動きだけでなく、スプレーのON/OFFの動作も指定しなければなりません。
関節の動作とスプレーの出力動作は別々に指定するため、ティーチング後もテストと修正を繰り返し行い最適な塗装条件を確立していきます。
複雑形状のワークの場合、1つのワークのティーチングに半日以上かかってしまうこともあります。

始点・終点の指定はティーチングペンダントでロボットを操作し行う方法と、ロボットを直接その位置へ動かし指定する方法があります。(画像はイメージです)
軌道ティーチング方式
前述のポイント to ポイント方式では、機械の得意とする正確で一定の動きを再現することができますが、曲線的な動きや細かな技術を再現することは困難です。
そこで、これらの細かな動作を記録させる方法が軌道ティーチング方式です。
名称は各メーカーにより異なりますがその方法は同一で、ロボットのアームやティーチング用のコントローラーを実際に人間が手で動かし、その位置情報を一定間隔で連続記録し繋げることで、人間のような滑らかな動きをティーチングします。
ロボットのアームを動かす場合は、各軸の座標情報が記録されますのですぐに動作させることができますが、ティーチング用のコントローラーで動きを覚えさせる場合は、専用ソフトで動きを座標データに変換する必要があります。
塗装をしながらティーチングができるLEBOT MV A6も、この軌道ティーチング方式に該当します。
なるほど!ティーチングはこのように行われていたんですね
外部に依頼するとコストがかかり、ワークが増えたり変更したりする度に依頼しなければいけないので、社内でティーチングを行いたいのですが、どうすればよいでしょうか?
ティーチングするには、法律に基づいた教育を受講する必要があるんです!
必殺技で詳細をご紹介します!
お問い合わせ・ご相談はこちらなのだぁ~